Meet the Robot
FTC Team #27883
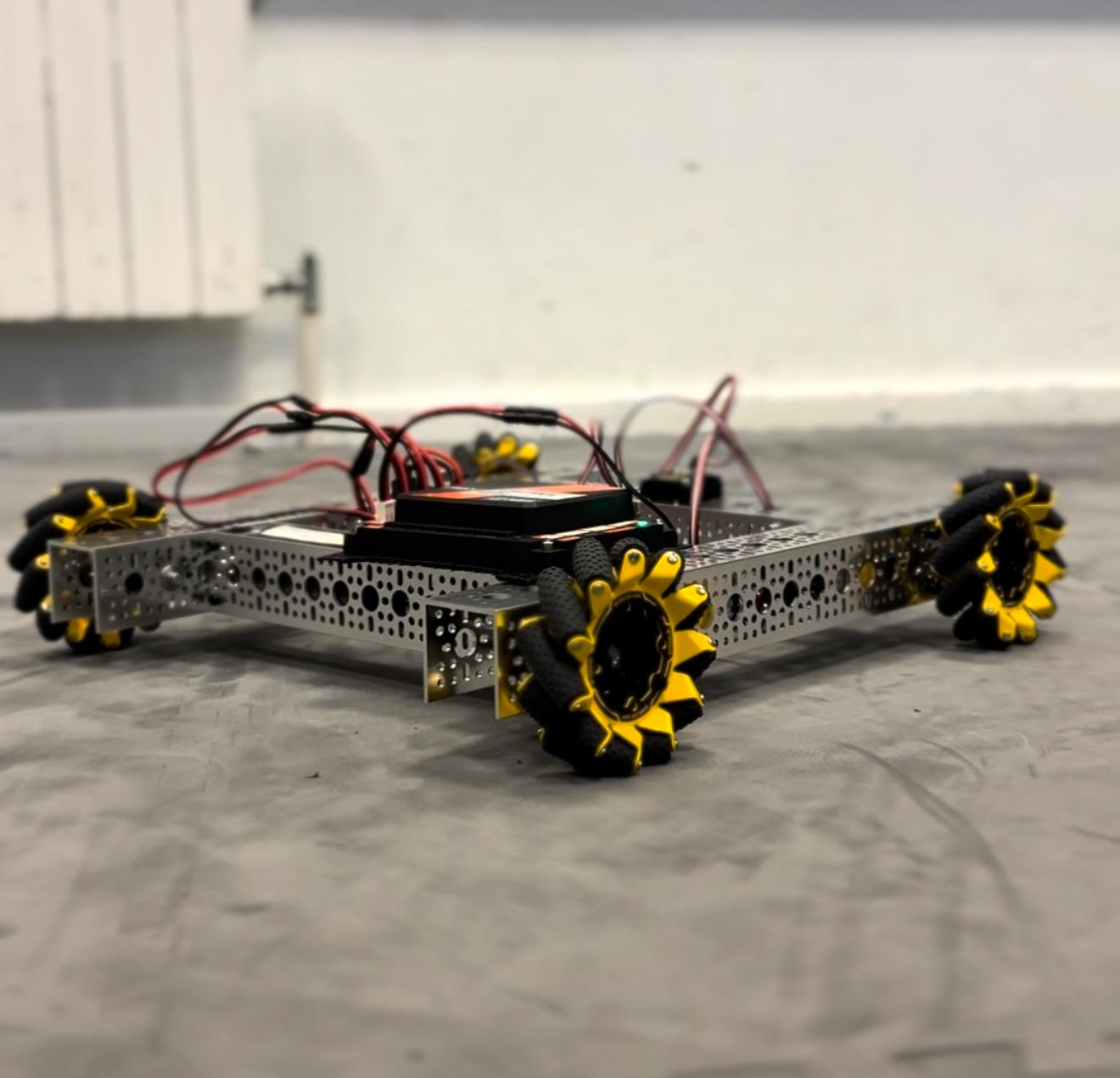
Drivetrain
Being the core of the robot, our drivetrain engineers ensured to make the drivetrain as durable as possible.
The highlight features are the mechanum wheels, which enable omnidirectional movement. Our programmers took advantage of this and allowed strafing using the movement stick, creating more flexible movement options for our drivers in a match.
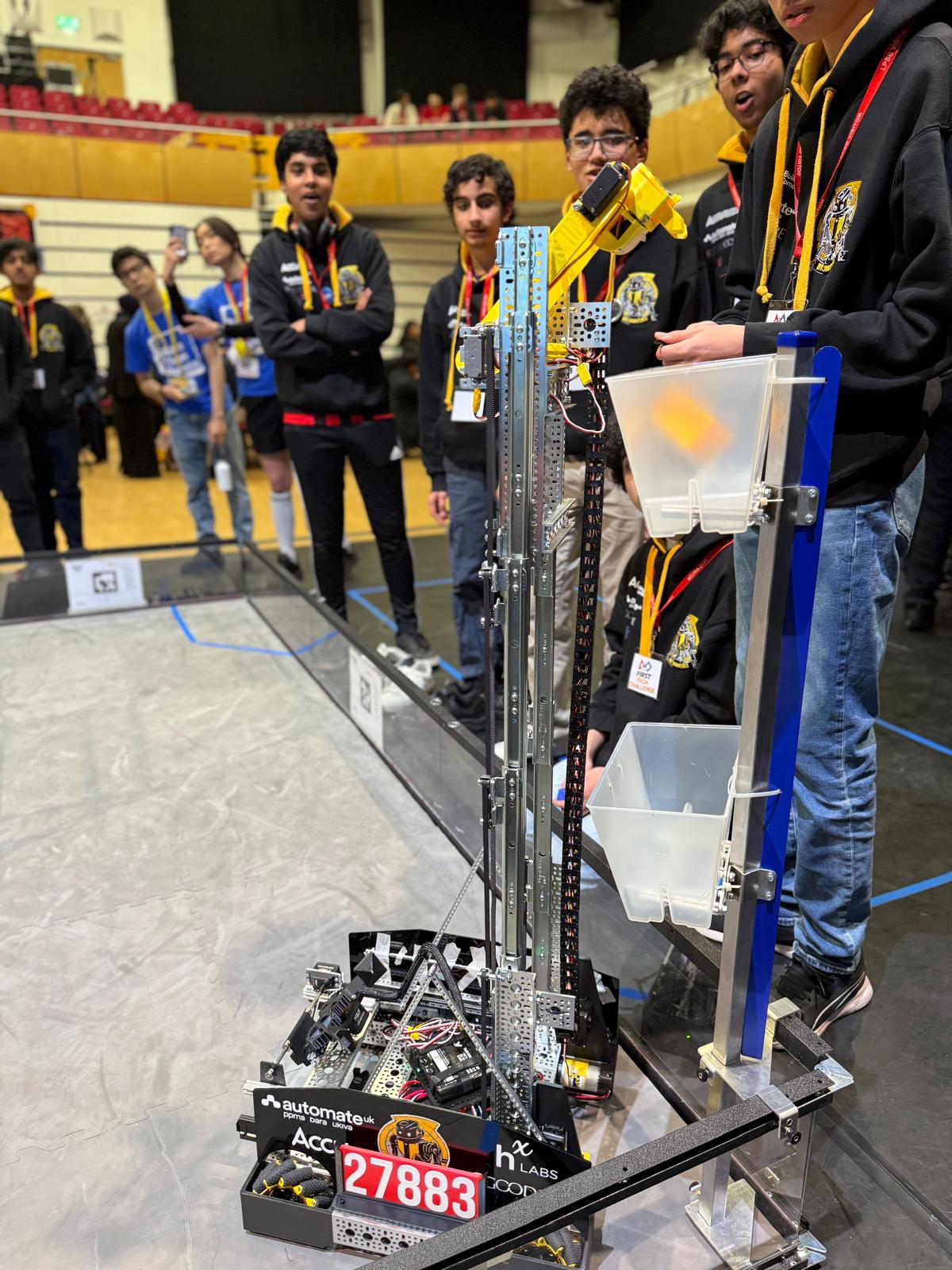
Front Claw
The first of two claws on the robot, the front claw's function is to grab samples to then deposit to the claw on the vertical arm.
The claw was designed by our CAD technician Sampath, and its unique mould complements the convex shape of the samples to make picking them up easier.
It is placed on a sliding horizontal arm which allows the robot to pick up samples from a large distance.

Vertical Arm
Our most complicated piece of machinery, the vertical arm enables the robot to deposit samples in baskets and hang specimens on the submersible.
The yellow claw receieves samples from the front claw and was also specially designed. Unlike the front claw, it has smaller, more precise claws. It also utilises linear slides in order to extend.