February 12, 2025
Building a robot for the FIRST Tech Challenge (FTC) is never a straightforward task. For our team, it was a journey of trial and error, late-night brainstorming sessions, and a lot of learning on the fly. In this post, we want to share not just what our robot is made of, but how we arrived at the design choices that shaped it.
Every robot needs a solid foundation, and for us, that meant designing a drivetrain that could handle the unpredictable nature of competition. We debated between several wheel types before settling on mecanum wheels, which allow for omnidirectional movement. This decision wasn’t just about flexibility—it was about giving our drivers the ability to react quickly and creatively during matches. Our programmers worked closely with the mechanical team to fine-tune the controls, ensuring that strafing and precise maneuvers felt natural and responsive. The process involved countless test runs, code tweaks, and even a few accidental crashes, but the end result was a drivetrain that felt like an extension of the driver’s intent.
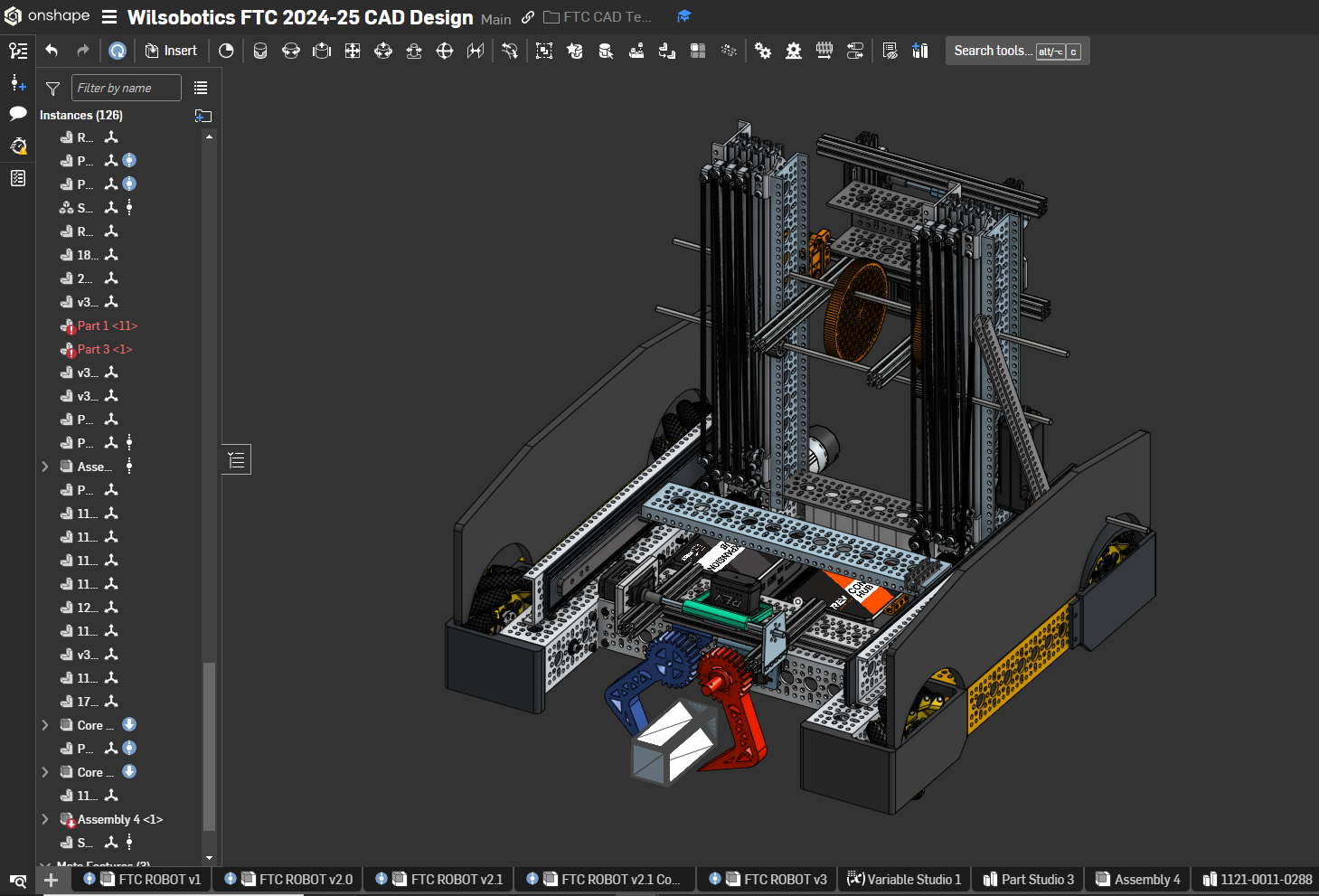
One of the earliest challenges we faced was figuring out how to efficiently pick up and transfer game elements. The front claw became our answer to this problem. Designed by our CAD specialist, Sampath, the claw’s unique shape was inspired by the need to grip objects of varying sizes and shapes. We experimented with different materials and prototypes, often finding that what worked in theory didn’t always work in practice. The final design sits on a sliding horizontal arm, giving the robot an impressive reach and the ability to collect items from tricky positions on the field. This feature proved invaluable during practice matches, where quick pickups often made the difference between winning and losing.
Perhaps the most ambitious part of our robot is the vertical arm. This mechanism was designed to handle the most complex tasks—lifting, hanging, and placing objects with precision. The arm incorporates a secondary claw, smaller and more delicate than the front one, which required its own set of design considerations. We used linear slides to give the arm its range, but making it both strong and lightweight was a constant balancing act. There were moments when the arm would wobble or fail to extend smoothly, forcing us back to the drawing board. Through persistence and teamwork, we refined the mechanism until it could perform reliably under pressure.
Looking back, building our robot was as much about collaboration and resilience as it was about engineering. Each subsystem presented its own set of challenges, but by working together and embracing setbacks as learning opportunities, we created a machine we’re truly proud of. The experience has not only prepared us for competition, but also taught us the value of perseverance, creativity, and teamwork.